
طراحی روبات هایی که به صورت خودگردان تکامل می یابند
پیشنهاد شده است که اگر انسان قرار باشد روزی در سایر سیارات مستقر شود، به یک گروه پیش آهنگ از روبات ها نیاز خواهد بود. برای ایجاد شرایط مطلوب برای نوع بشر، این روبات های پیش فرستاده شده برای زنده ماندن در آب و هوای نامهربان کیهانی که در انتظار آنها است، باید سخت، سازگار و قابل بازیافت باشند.با همکاری روبات شناسان و دانشمندان کامپیوتر، من و تیمم فقط روی چنین مجموعه ای از روبات ها کار کرده ایم. روبات هایی که ما در حال ایجاد آنها هستیم و از طریق چاپگر سه بعدی تولید می شوند - و به طور خودگردان مونتاژ می گردند - برای بهینه سازی سریع شرایطی که در آن قرار می گیرند، به طور مداوم تکامل می یابند.
یک مأموریت خود گردان برای آوار برداری به یک سیستم روباتیک نیاز دارد که باید شامل اقدامات ایمنی مناسب باشد و باید بتواند براساس سناریوهای غیر منتظره تصمیمات موضعی اتخاذ کند.کار ما نشان دهنده آخرین پیشرفت به سمت نوعی اکوسیستم روبات های خود گردان است که می تواند به ساخت خانه های آینده بشریت، بسیار دور از زمین و دور از نظارت انسان، کمک کند.
خیزش روبات ها
روبات ها از زمان اولین یورش های ناشیانه ما به قلمرو حرکت مصنوعی، در دهه ها پیش، مسیری طولانی را تاکنون طی کرده اند. امروزه کمپانی هایی مانند Boston Dynamics روبات هایی بسیار کارآمد تولید می کنند که کامیون ها را بارگیری می کنند، پالت می سازند و جعبه ها را در اطراف کارخانه ها جابجا می کنند و وظایفی را انجام می دهند که پیش از این فکر می کردید فقط انسان ها می توانند انجام دهند.با وجود این پیشرفت ها، طراحی روبات ها برای کار در محیط های ناشناخته یا نامهربان - مانند سیارات فراخورشیدی یا گودال های عمیق اقیانوسی - هنوز هم چالش قابل توجهی برای دانشمندان و مهندسان به وجود می آورد. در کیهان، روبات ایده آل چه شکل و اندازه ای باید داشته باشد؟ باید بخزد یا راه برود؟ چه ابزارهایی برای دستکاری در محیط خود نیاز دارد - و چگونه در شرایط فشارهای شدید، دماهای نامتعارف و خوردگی شیمیایی زنده خواهد ماند؟
طبیعت قبلاً این مشکل را، که یک بازی فکری غیر ممکن برای بشر بوده است، حل کرده است. تکامل داروینی منجر به ایجاد میلیون ها گونه شده است که کاملاً با محیط خود سازگار هستند. اگر چه تکامل بیولوژیکی میلیون ها سال به طول می انجامد، اما تکامل مصنوعی - مدل سازی فرایندهای تکاملی درون رایانه - می تواند در عرض چند ساعت یا حتی چند دقیقه صورت گیرد. دانشمندان کامپیوتر چندین دهه است که از قدرت این تکامل استفاده می کنند، و این در نتیجه مثلاً منجر شده است به ایجاد نازل های گاز برای آنتن های ماهواره ای که برای عملکرد آنها مناسب باشد.
اما تکامل مصنوعی جاری اشیاء فیزیکی در حال حرکت هنوز هم به نظارت زیادی از انسان احتیاج دارد که این به یک حلقه بازخورد فشرده بین روبات و انسان نیاز دارد. اگر تکامل مصنوعی قرار باشد یک روبات مفید برای اکتشافات خارج از سیاره ای طراحی کند، لازم است که انسان را از این حلقه خارج کنیم. در واقع، طراحی های روبات تکامل یافته، باید به گونه ای خود گردان خود روبات ها را، بدون وابستگی به نظارت انسانی، تولید، مونتاژ و آزمایش کند.
انتخاب غیر طبیعی
هر روباتی که تکامل یافته باشد باید توانایی درک محیط خود را داشته باشد و از وسایل مختلفی برای حرکت، به عنوان مثال با استفاده از چرخ ها، پایه های متصل یا حتی مخلوطی این دو، برخوردار باشد. و برای رفع شکاف واقعیت اجتناب ناپذیری که هنگام انتقال طراحی از نرم افزار به سخت افزار رخ می دهد، همچنین مطلوب است که حداقل مقداری از تکامل در سخت افزار، در یک اکوسیستم از روبات ها که در زمان و مکان عینی تکامل می یابند، اتفاق بیفتد.خود گردانی به ویژه برای سیستم های روباتیک فضایی آینده نزدیک بسیار ضروری است زیرا آنها باید در محیط های سخت و کمتر شناخته شده عمل کنند.پروژه Autonomous Robot Evolution (ARE) دقیقاً به این مسئله اشاره دارد و دانشمندان و مهندسان چهار دانشگاه را در یک پروژه بلند پروازانه چهار ساله برای توسعه این فناوری جدید بنیادین گرد هم آورده است.

تصویر: نمودار اتاقی که روبات ها در آن "متولد" می شوند و پس از کاوش اتاق "بازیافت می شوند". سخت افزارهای روباتیک در این مکانِ گهواره تا گور، انتخاب طبیعی را تجربه می کنند. توسط اما هارت، نویسنده، ارائه شده است (بدون حق استفاده مجدد).
همان طور که در بالا نشان داده شد، روبات ها با استفاده از تولید سه بعدی "متولد" می شوند. ما برای طراحی از نوع جدیدی از معماری تکاملی ترکیبی سخت افزار - نرم افزار استفاده می کنیم. این بدان معنی است که هر روبات فیزیکی یک کلون یا شبیه دیجیتالی دارد. روبات های فیزیکی در محیط های واقعی از نظر عملکرد مورد آزمایش قرار می گیرند، در حالی که کلون های دیجیتالی آنها وارد یک برنامه نرم افزاری می شوند و در آنجا به سرعت شبیه سازی می شوند. این سیستم ترکیبی نوعی تکامل جدید را معرفی می کند: نسل های جدید را می توان از یک اتحاد بین موفق ترین صفات از یک "مادر" مجازی و یک "پدر" فیزیکی تولید کرد.
همان طور که در شبیه ساز ما ارائه شده است، روبات های "کودک" که از طریق تکامل ترکیبی ما تولید می شوند نیز به صورت سه بعدی چاپ شده و به یک محیط شبه مهد کودک دنیای واقعی معرفی می شوند. موفق ترین افراد در این مرکز تربیت فیزیکی، "کد ژنتیکی" خود را برای تولید مثل و برای بهبود نسل های آینده در دسترس قرار می دهند، در حالی که روبات های "کمتر مناسب" را می توان به سادگی از چرخه کار خارج و به عنوان بخشی از یک چرخه تکاملی در حال انجام، به روبات های جدید بازیافت کرد.
با گذشت دو سال از اجرای این پروژه، پیشرفت های چشمگیری حاصل شده است. از منظر علمی، ما الگوریتم های تکاملی مصنوعی جدیدی را طراحی کرده ایم که مجموعه ای متنوع از روبات ها را که توانایی رانندگی یا خزیدن دارند، تولید کرده و می توانند در پیچ و خم های پیچیده حرکت کنند. این الگوریتم ها هم طرح بدنی و هم مغز روبات را تکامل می بخشند.
بخشی جدایی ناپذیر از هر برنامه فضایی، تحقیق در مورد سیستم های پیشرفته روباتیک و فناوری های توانمند آنها برای انجام موفقیت آمیز مأموریت های فضایی است.مغز دارای یک کنترل کننده است که نحوه حرکت روبات را تعیین می کند، اطلاعات حسی گرفته شده از محیط را تفسیر می کند و آنها را به کنترل های حرکتی ترجمه می نماید. هنگامی که روبات ساخته شد، یک الگوریتم یادگیری، مغز کودک را به سرعت پالایش می کند تا هرگونه عدم تطابق احتمالی بین بدن جدید و مغز ارثی آن را به حساب آورد.
از منظر مهندسی، ما "RoboFab" را به طور کامل اتوماتیک ساخت (یعنی سازنده به طور خودگران) طراحی کرده ایم. این بازوی روباتیک سیم ها، حسگرها و "اعضای دیگری" را که توسط تکامل انتخاب شده اند به شاسی چاپ سه بعدی روبات متصل می کند. ما این قطعات را برای تسهیل مونتاژ سریع طراحی کردیم و به RoboFab امکان دسترسی به یک جعبه ابزار بزرگ از اندام ها و اعضای روباتی را دادیم.

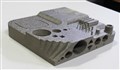
تصویر: یک شاسی سبز برای یک روبات در آزمایشگاه دانشمندان به صورت سه بعدی چاپ شده است. یک طرح بدنی تکامل یافته قبل از این که با «اندام» و «مغز» مجهز شود، به صورت سه بعدی چاپ می شود. توسط اما هارت، نویسنده، ارائه شد (بدون استفاده مجدد).
دفع زباله
اولین مورد اصلی که ما قصد داریم به آن بپردازیم، استفاده از این فناوری برای طراحی روبات ها برای پاک سازی زباله های قدیمی در یک راکتور هسته ای است - مانند آنچه در مینی سریال تلویزیونی چرنوبیل دیده می شود. استفاده از انسان برای این کار هم خطرناک و هم گران است و راه حل های روباتیک لازم برای توسعه باقی می مانند.با نگاه رو به جلو، چشم انداز بلند مدت عبارت است از توسعه کافی فناوری به آن اندازه که تکامل اکوسیستم های روباتیک تمام خود گردانی را ممکن سازند که بدون نیاز به نظارت مستقیم انسان برای مدت طولانی در محیط های چالش برانگیز و پویا زندگی و کار کنند.
در این الگوی جدید رادیکال، روبات ها بیش از آنکه طراحی و تولید شوند، باردار و متولد می شوند. چنین روبات هایی اساساً مفهوم ماشین ها را تغییر می دهند و نژاد جدیدی را به نمایش می گذارند که می تواند شکل و رفتار آنها را با گذشت زمان تغییر دهد - درست مثل ما.
جهشی بزرگ برای روبات های فضایی

تصویر: آیا این یک جهش عظیم برای robotkindیا نوع روبات (در مقابل نوع بشر) است؟ سفرهای فضایی در آینده تنها از طریق پیشرفت های گسترده در زمینه روباتیک فضایی امکان پذیر خواهد بود. شاتر استوک
مأموریت موفق آپولو 11 در پنجاه سال قبل، نقطه عطفی در صنعت فضایی بود. این قابل مقایسه است با پرواز برادران رایت در سال 1903 است که آغاز صنعت هواپیمایی بود و اختراع موتور بخار جیمز وات، که نقطه عطف دوران صنعتی شدن است. اولین قدم در سطح ماه به عنوان آغاز عصر اکتشاف فضا شناخته می شود.
طراحی روبات ها برای کار در محیط های ناشناخته یا نامهربان - مانند سیارات فراخورشیدی یا گودال های عمیق اقیانوسی - هنوز هم چالش قابل توجهی برای دانشمندان و مهندسان به وجود می آورد.ابتکارات مهم اخیر بین المللی در زمینه اکتشاف و بهره برداری از فضا، مانند برنامه اکتشافی مریخ، برنامه شتاب دهنده اکتشافات قمری، ایستگاه فضایی بین المللی (ISS) وOSIRIS-Rex ، با هدف پاسخ دادن به برخی از سؤالات اساسی بشریت بوده است، از جمله این که: منشأ کیهان و زندگی چیست؟ منابع جایگزین انرژی و مواد برای نسل های آینده انسان کدام است؟ چگونه از خود در برابر تهدیدات فرازمینی مانند برخورد ستاره های دنباله دار یا سیارک ها محافظت کنیم؟

من بنیانگذار و مدیر آزمایشگاه خود گردان روباتیک فضایی و مکاترونیک (آزمایشگاه ASRoM) هستم، جایی که تیم تحقیقاتی ما در حال توسعه الگوریتم ها و روش های هدایت، ناوبری و کنترل هوشمند سیستم های روباتیک فضایی نسل آینده، از جمله دستکاری کننده های پرواز آزاد و مریخ نوردهای خود گردان است.
روبات ها در فضا
امروزه، بخشی جدایی ناپذیر از هر برنامه فضایی، تحقیق در مورد سیستم های پیشرفته روباتیک و فناوری های توانمند آنها برای انجام موفقیت آمیز مأموریت های فضایی است. Canadarm 1 و Canadarm 2 و Dextre (SPDM: Special Purpose Dexterous Manipulator) نمونه هایی از سیستم های دستکاری کننده هستند که در ساخت و بهره برداری از ایستگاه فضایی بین المللی مورد استفاده قرار گرفته اند. هدف ایستگاه فضایی، بررسی تأثیرات جاذبه خرد و محیط خشن فضای بیرونی بر موجودات زنده، ابزار دقیق و فناوری های مهندسی برای آماده شدن برای مراحل بعدی اکتشافات فضایی بود.چشم انداز بلند مدت عبارت است از توسعه کافی فناوری به آن اندازه که تکامل اکوسیستم های روباتیک تمام خود گردانی را ممکن سازند که بدون نیاز به نظارت مستقیم انسان برای مدت طولانی در محیط های چالش برانگیز و پویا زندگی و کار کنند.یک برنامه فضایی پایدار به سیستم های روباتیک کاملاً خود گردان و قابل اتکا هم برای حفظ زیر ساخت های فضایی موجود و هم برای ساخت سیستم های جدید فراتر از مدارهای کم ارتفاع زمین نیاز دارد. خود گردانی به ویژه برای سیستم های روباتیک فضایی آینده نزدیک بسیار ضروری است زیرا آنها باید در محیط های سخت و کمتر شناخته شده عمل کنند. آنها همچنین به دلیل تأخیر در برقراری ارتباط، باید با مأموریت های سریع، مکرر و پیچیده ای که نیاز به تصمیمات موضعی دارند، کنار بیایند.
خود گردنی
همه جنبه های زندگی ما، از علم و فناوری گرفته تا ایمنی و امنیت، به سیستم های ماهواره ای ما وابسته است. ماهواره ها خدماتی از جمله مشاهدات نجومی، ارتباطات از راه دور، رصد زمین، سیستم ناوبری جهانی، نظارت نظامی و پیش بینی هوا را ارائه می دهند، که همه این ها برای زندگی روزمره ما بسیار مهم هستند. برای تداوم خدمات بی وقفه آنها در زمین و محافظت از ماهواره های مدار، سرویس دهی روی مدار به ماهواره های غیر عادی و حذف بقایای فضایی در مدار بسیار مهم است.پس از سال ها کاوش و بهره برداری از فضا، ده ها هزار قطعه از بقایای ساخته شده توسط انسان در اطراف سیاره ما جمع شده است. بدون تلاش فعال برای حذف این اجسام از مدار، ماموریت های فضایی آینده مستعد شکست هستند.
یک رویکرد امیدوار کننده برای آوار برداری فعال، از یک سیستم دستکاری کننده و تعقیب کننده استفاده می کند، که هدایت، ناوبری و کنترل آن در حین عملیات مجاورت به دلیل پویایی حرکت همراه تعقیب کننده و دستکاری کننده و حرکت غیر قابل کنترل بقایا، چالش برانگیز است. علاوه بر این، برای داشتن یک مأموریت موفق برای حذف آوار، عملیات روباتیک باید در برابر سناریوهای غیر منتظره ای مانند تلاش های ناموفق، تغییر محیط و ضربه در مرحله گرفتن، انعطاف پذیر باشد، که این می تواند به طور قابل توجهی بر حرکت سیستم تعقیب کننده - دستکاری کننده و حرکت آوارها اثر بگذارد.
یک مأموریت خود گردان برای آوار برداری به یک سیستم روباتیک نیاز دارد که باید شامل اقدامات ایمنی مناسب باشد و باید بتواند براساس سناریوهای غیر منتظره تصمیمات موضعی اتخاذ کند. به عنوان مثال، سیستم روباتیک باید بتواند ثبات را به دست آورد و جهت نزدیک شدن خود را پس از یک تلاش ناموفق برای تصرف آوار تغییر دهد.
جامعه فضایی بین المللی در حال حاضر بر روی برنامه های Lunar Gateway و Deep Space اکتشافات متمرکز شده است که نیاز به ساخت زیستگاه های دائمی در مدارهای ماه و مریخ دارد.
مونتاژ سازه های بزرگ، میلیون ها مایل دورتر از زمین، مستلزم استقرار بسیاری از دست کاری کننده های مقرون به صرفه، خود گردان و پرواز آزاد است که برای چندین روز بدون دخالت انسان، به صورت مشارکتی کار کنند. این دستیارهای نسل آینده باید بتوانند با محیط های پویا کنار بیایند، ساختارهای بزرگ و انعطاف پذیر را اداره کنند و به صورت بی سیم با یکدیگر ارتباط برقرار کنند.
روبات ها با استفاده از تولید سه بعدی "متولد" می شوند.
خود گردانی مریخ نورد
دسته دیگر سیستم های روباتیک فضایی، سکوهای مریخ نورد چرخدار هستند که از آنها برای اکتشاف سطح سیاره ها استفاده می شود. چنین سیستم هایی دارای طول عمری طولانی هستند که طی آن باید زمین های ناشناخته و احتمالاً پویا را طی کنند، اشیاء را دستکاری نمایند، و نمونه های با ارزش علمی را از هم تشخیص دهند و آنها را جمع آوری نمایند. به دلیل چالش های ارتباطی، آنها همچنین برای تصمیم گیری موضعی و گاهی تشخیص، ترمیم یا کالیبراسیون خود به هوش بالایی نیاز دارند.ناوگان های مدارگرد، فرودگر و گشتگر برای یافتن نشانه های حیات به سوی سایر اجرام آسمانی فرستاده شده اند. موفق ترین مأموریت ها، شامل گشتگرهای خود گردان، عبارت بودند از Sojourner (مریخ، 1997) ، Spirit (مریخ، 2004-2010) ، Opportunity (مریخ ، 2003-2018) و سرانجام، Curiosity (مریخ، 2012) که هنوز در حال کاوش در این سیاره است.
ویژگی های منحصر به فرد مریخ نوردها چالش هایی را در سیستم های هدایت، ناوبری و کنترل آنها ایجاد می نماید. برخی از این چالش ها شامل طراحی لاستیک برای زمین های ناشناخته و آموزش به مریخ نورد برای اجتناب از موانع است.
اگر چه تکامل بیولوژیکی میلیون ها سال به طول می انجامد، اما تکامل مصنوعی - مدل سازی فرایندهای تکاملی درون رایانه - می تواند در عرض چند ساعت یا حتی چند دقیقه صورت گیرد.چالش دیگر، شناسایی موقعیت نسبی و مطلق یک مریخ نورد است. کیلومتر شمار چرخ - محاسبه مکانی که مریخ نورد، بر اساس شمارش چرخش چرخ های آن، قرار دارد - یک فناوری محبوب تعیین موقعیت است. اما با گذشت زمان به دلیل لغزش چرخ در اراضی کم کششی مانند خاک نرم، نسبت به ارتکاب خطاهای قابل توجه، حساس است. مثال بارز شکست مأموریت به دلیل از بین رفتن کشش، مریخ نورد اسپیریت است که در خاک نرم گیر کرده و غیر عملیاتی شده است.
منبع: اِما هارت، روبین چهابرا، Edinburgh Napier University، Carleton University


















 سال 1404")







 تبیین بود")
")
